В.В. Рябченко, Н.Н. Дацун
ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ РОБОТАМИ-МАНИПУЛЯТОРАМИ ФИРМЫ NEURONICS AG
Аннотация
Разработан язык управления роботом для управляющей части программно-аппаратного комплекса управления роботом-манипулятором ф. Neuronics AG. Реализован программный интерфейс на базе KNI. Разработан ПИ для семейста роботов ф. Neuronics AG в симуляторе Webots и на реальном оборудовании для модели Katana.
Роботы-манипуляторы широко используются в лабораторных исследованиях, автоматизированном промышленном производстве, измерениях и т.д.. Объектом исследования является робот-манипулятор Katana фирмы Neuronics AG (Швейцария) и его модель в симуляторе Webots [1]. Цели работы:
- исследование методов программного управления роботами-манипуляторами Katana фирмы Neuronics в операционных системах Linux и MS Windows;
- разработка программного интерфейса “библиотека KNI [2] – микропрограммное обеспечение (Firmware) робота”;
- проектирование и разработка пользовательского интерфейса (ПИ) для программного управления роботами-манипуляторами фирмы Neuronics.
Робот-манипулятор – это автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве и для выполнения различных производственных процессов. Среди роботов-манипуляторов продукция фирмы Neuronics выделяется такими преимуществами как относительно доступная цена, интеллектуальность, семейство роботов Katana для использования в различных целях.
Программное обеспечение (ПО) для управления роботом Katana представляет собой кроссплатформенную библиотеку KNI (Katana Native Interface) с открытым кодом (на языке С++). Это позволяет разрабатывать системы программного управления роботами-манипуляторами для различных предметных областей. Разработчику ПО для управления роботами-манипуляторами также доступно описание системы команд самого робота.
Библиотеку KNI можно также использовать и в симуляторе роботов Webots [1], создавая модели роботов компании Neuronics AG.
Поэтому при разработке ПО для управления роботами используют два метода:
1) моделирование в среде симулятора;
2) программирование и тестирование с помощью программно-аппаратного комплекса с использованием робота.
Объектом исследования являлись
робот-манипулятор Katana 5M180
(рис.1) и библиотека управления KNI 3.9.2.
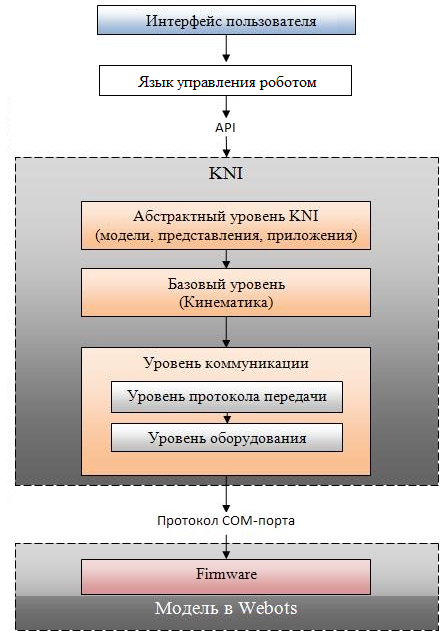
Рис. 1 – Схема ПО программно-аппаратного комплекса управления роботами-манипуляторами фирмы Neuronics AG
Схема ПО программно-аппаратного комплекса
управления роботами-манипуляторами фирмы Neuronics AG представлена на
рис. 1. Она основана на архитектуре KNI. В данной
работе для Katana 5M180
разработан язык управления роботом (табл.1) и интерфейс пользователя.
Таблица 1. – Система команд языка управления роботом
|
Имя коман-ды |
Семантика |
Имя коман-ды |
Семантика |
|
1. Специфические задачи |
3. Команды задания параметров и мониторинга |
||
|
C |
Calibrate the Katana |
E |
Read the current encoder values |
|
O |
Switch motors off/on (Default: On) |
X |
Read the current position using DK |
|
R |
Switch angle format: Radian/Degree (Default: Rad); |
v |
Set the velocity limits for all motors seperately |
|
? |
Display this help |
V |
Set the velocity limits for all motors |
|
U |
Unblock motors after crash |
a |
Set the acceleration limits for all motors seperately |
|
2. Команды перемещения |
A |
Set the acceleration limits for all motors |
|
|
M |
Move to a specific position |
W |
Read the velocity limits of all motors |
|
Y |
Set a new position using IK |
W |
Read the acceleration limits of all motors |
|
> |
Move to a specific point |
Q |
Read the Sensors |
|
G |
Open Gripper |
T |
Switch crash limit on/off |
|
H |
Close Gripper |
s |
Set the crash limit for all motors seperately |
|
D |
Move motor to degrees |
S |
Set the crash limit for all motors |
|
L |
Switch on/off linear movements |
||
Программный и пользовательский интерфейсы на первом этапе были созданы и подключены к визуальному симулятору Webots. Возможность графической симуляции функционирования робота исходит из разделения аппаратного обеспечения на две составляющие: управляющее (компьютер) и исполнительное (робот). Моделирование выполнялось для исполнительной части. Взаимодействие между компонентами аппаратуры на физическом уровне осуществляется через COM-порт компьютера (соответственно, на программном уровне реализуется через протокол COM-порта).
На втором этапе программный и пользовательский интерфейсы были апробированы на реальном оборудовании.
Важно то, что робот-манипулятор имеет собственный блок управления (обработки команд) с программным интерфейсом, позволяющий управлять роботом с помощью предустановленного набора команд. Пример команды Firmware в текстовой форме, посылаемой на COM-порт: d: 1 24 28528 -25 0 (шифр команды, параметры).
KNI [2] предоставляет набор классов для управления роботом на более высоком уровне абстракции, чем команды Firmware. Фактически KNI вместе с пользовательским интерфейсом (ПИ) работает как транслятор языка управления роботом в команды робота. На рис. 2 представлен алгоритм работы разработанного транслятора.
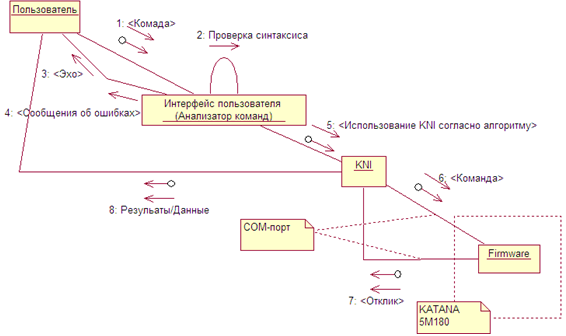
Рис. 2 – Алгоритм работы транслятор языка управления роботом
Разработанный транслятор является интерпретатором. Например, команда установить робот в заданное положение:
M: 0, 28528, 15021, 32014, 7741 преобразуется в набор команд, которые посылаются ему для немедленного исполнения:
d: 1 24 28528 -25 0
d: 2 24 15021 -25 0
d: 3 24 32014 -25 0
d: 4 24 7741 -25 0
Схема работы программной части программно-аппаратного комплекса управления роботом-манипулятором ф. Neuronics AG представлена на рис. 3.

Рис. 3 – Схема работы программной части программно-аппаратного комплекса управления роботом-манипулятором
ПИ комплекса управления роботом-манипулятором относится к классу процедурно-ориентированный символьный интерфейс, вид интерфейса – командный, технология командной строки (CLI) с консольным вводом/выводом.
1. Предложена и апробирована методика создания ПО программно-аппаратного комплекса управления роботом-манипулятором при использовании моделирующей среды.
2. Разработан язык управления роботом для управляющей части программно-аппаратного комплекса. Выполнена реализация интерпретатора этого языка в язык роботов семейства Katana.
3. Реализован программный интерфейс между управляющей и исполнительной частями программно-аппаратного комплекса в операционных системах Linux и MS Windows.
4. Разработан ПИ для семейста роботов ф. Neuronics AG в симуляторе Webots и на реальном оборудовании для модели Katana 5M180. Данная работа выполнялась в рамках украинско-исследовательского проекта ДонНТУ - Université de Cergy-Pontoise и НИР 11-316 «Біо-подібні моделі гуманоїдних роботів у ритмічній взаємодії з їх навколишнім оточенням» (под рук. Борисенко В.Ф., Хоменко В.Н., Мельника А.А.). Направления дальнейшей работы – развитие языка управления и графического ПИ.
Литература
1. Webots: the mobile robotics simulation software. Режим доступа: http://www.cyberbotics.com/. – Заглавие с экрана.